Mapping Boston Streets using an Autonomous Car .
Abstract:
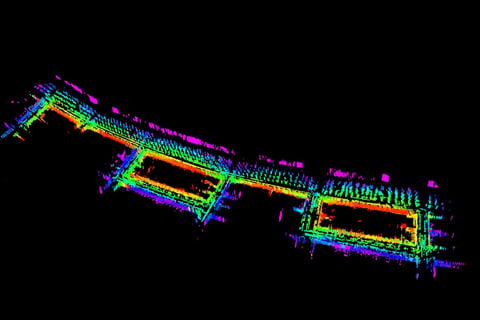
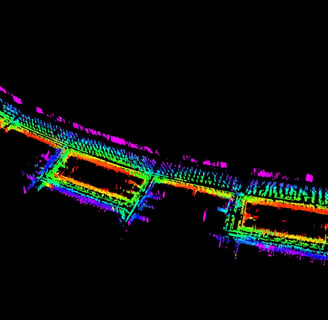
This project aims to create a detailed point cloud map of selected streets in Boston using the LEGO-LOAM SLAM (Simultaneous Localization and Mapping) algorithm on the NUANCE autonomous vehicle. To accommodate the specific conditions and data collected during our mapping runs, the standard LEGO-LOAM system was modified and optimized for our dataset.
LEGO-LOAM is a lightweight and computationally efficient LiDAR-based odometry and mapping system designed for ground-based autonomous vehicles in ROS (Robot Operating System) environments. In this implementation, the system processes point cloud data from a Velodyne VLP-16 LiDAR sensor and produces real-time 6-degree-of-freedom (6D) pose estimation. Unlike traditional LOAM systems, which are resource-heavy and can introduce delays, LEGO-LOAM reduces computation time while maintaining high accuracy. This optimization is critical for real-time applications in autonomous navigation, where efficiency and precision are essential for navigating complex, dynamic environments.
For this project, data was collected on various streets in Boston using the NUANCE vehicle. The vehicle was equipped with a Velodyne VLP-16 LiDAR for 3D mapping, a VectorNAV 9-DOF IMU for inertial measurements, GPS for global positioning, and a thermal camera for environmental context. Sensor data was recorded in Rosbag format for subsequent processing and analysis. The integration of these sensor modalities enabled comprehensive data fusion, which is vital for improving localization accuracy and ensuring reliable mapping in urban environments with varied terrain and obstacles.
This project critically evaluated LEGO-LOAM's performance for ground vehicle navigation, focusing on reducing computational overhead and improving real-time localization accuracy, making it more suitable for practical autonomous operations in urban environments.